Screencast of the lecture

📖 Convexity and uniqueness of optimizers#
⏱ | words
References and additional materials
In the last lecture we said that all the optimization theory applies to local maximizers/minimizers. This is true in general, but we have a special case where things are much simpler: when the objective function has a particular shape:
Concave functions \(\rightarrow\) local maxima are global maxima
Convex functions \(\rightarrow\) local minima are global minima
Concavity/convexity \(\rightarrow\) first order conditions become sufficient for optimality
Strict concavity/convexity \(\rightarrow\) uniqueness of the maximum/minimum
Convexity/concavity are referred to as shape conditions
Convexity is a shape property for sets
Convexity and concavity are shape properties for functions
Convex Sets#
Definition
A set \(C \subset \mathbb{R}^K\) is called convex if
Convexity \(\iff\) line between any two points in \(C\) lies in \(C\)
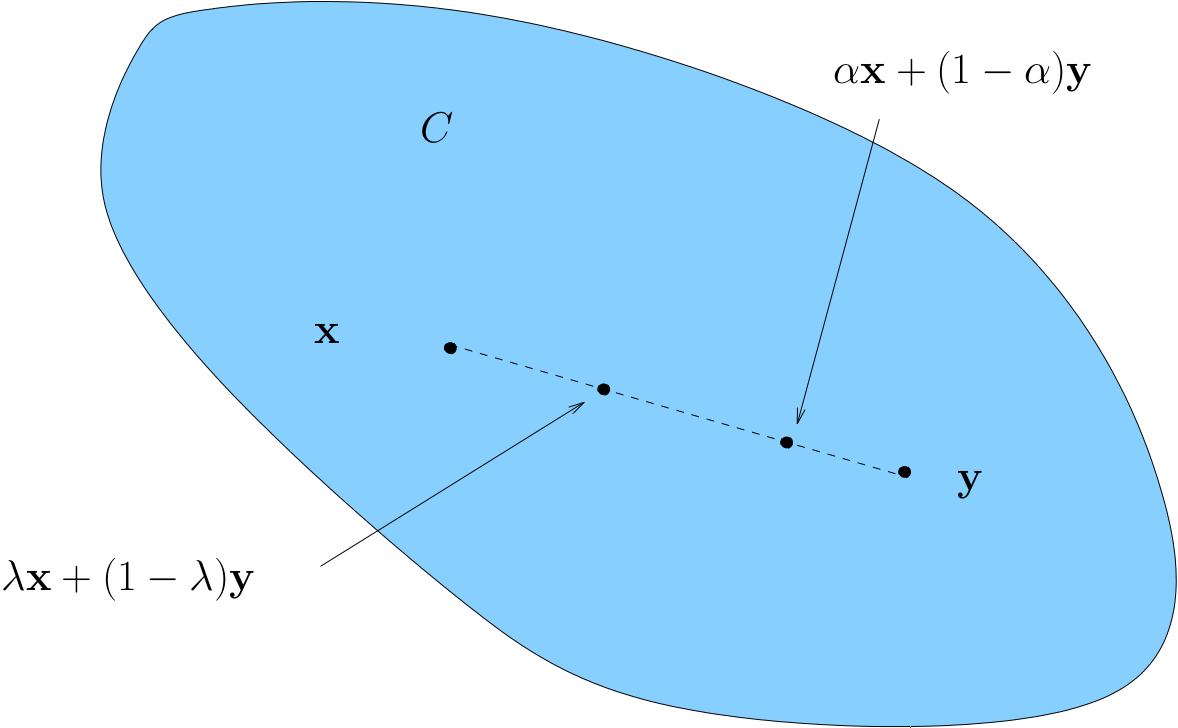
Fig. 56 Convex set#
A non-convex set
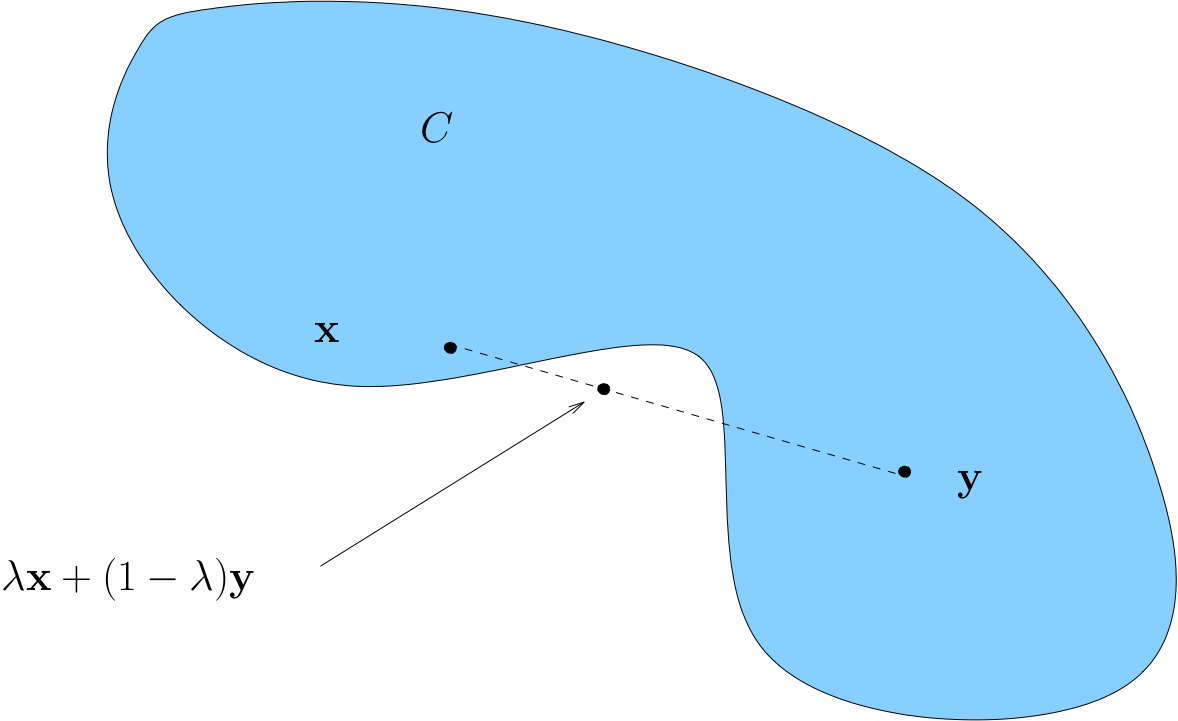
Fig. 57 Non-convex set#
Example
The “positive cone” \(P := \{ x \in \mathbb{R}^K \colon x \geq 0 \}\) is convex
Proof
To see this, pick any \(x\), \(y\) in \(P\) and any \(\lambda \in [0, 1]\)
Let \(z := \lambda x + (1 - \lambda) y\) and let \(z_k := e_k' z\)
Since
\(z_k = \lambda x_k + (1 - \lambda) y_k\)
\(x_k \geq 0\) and \(y_k \geq 0\)
It is clear that \(z_k \geq 0\) for all \(k\)
Hence \(z \in P\) as claimed
Example
Every \(\epsilon\)-ball in \(\mathbb{R}^K\) is convex.
Proof
Fix \(a \in \mathbb{R}^K\), \(\epsilon > 0\) and let \(B_\epsilon(a)\) be the \(\epsilon\)-ball
Pick any \(x\), \(y\) in \(B_\epsilon(a)\) and any \(\lambda \in [0, 1]\)
The point \(\lambda x + (1 - \lambda) y\) lies in \(B_\epsilon(a)\) because
Example
Let \(p \in \mathbb{R}^K\) and let \(M\) be the “half-space”
The set \(M\) is convex
Proof
Let \(p\), \(m\) and \(M\) be as described
Fix \(x\), \(y\) in \(M\) and \(\lambda \in [0, 1]\)
Then \(\lambda x + (1 - \lambda) y \in M\) because
Hence \(M\) is convex
Fact
If \(A\) and \(B\) are convex, then so is \(A \cap B\)
Proof
Let \(A\) and \(B\) be convex and let \(C := A \cap B\)
Pick any \(x\), \(y\) in \(C\) and any \(\lambda \in [0, 1]\)
Set
Since \(x\) and \(y\) lie in \(A\) and \(A\) is convex we have \(z \in A\)
Since \(x\) and \(y\) lie in \(B\) and \(B\) is convex we have \(z \in B\)
Hence \(z \in A \cap B\)
Example
Let \(p \in \mathbb{R}^K\) be a vector of prices and consider the budget set
The budget set \(B(m)\) is convex
Proof
To see this, note that \(B(m) = P \cap M\) where
We already know that
\(P\) and \(M\) are convex, intersections of convex sets are convex
Hence \(B(m)\) is convex
Convex Functions#
Let \(A \subset \mathbb{R}^K\) be a convex set and let \(f\) be a function from \(A\) to \(\mathbb{R}\)
Definition
\(f\) is called convex if
for all \(x, y \in A\) and all \(\lambda \in [0, 1]\)
\(f\) is called strictly convex if
for all \(x, y \in A\) with \(x \ne y\) and all \(\lambda \in (0, 1)\)
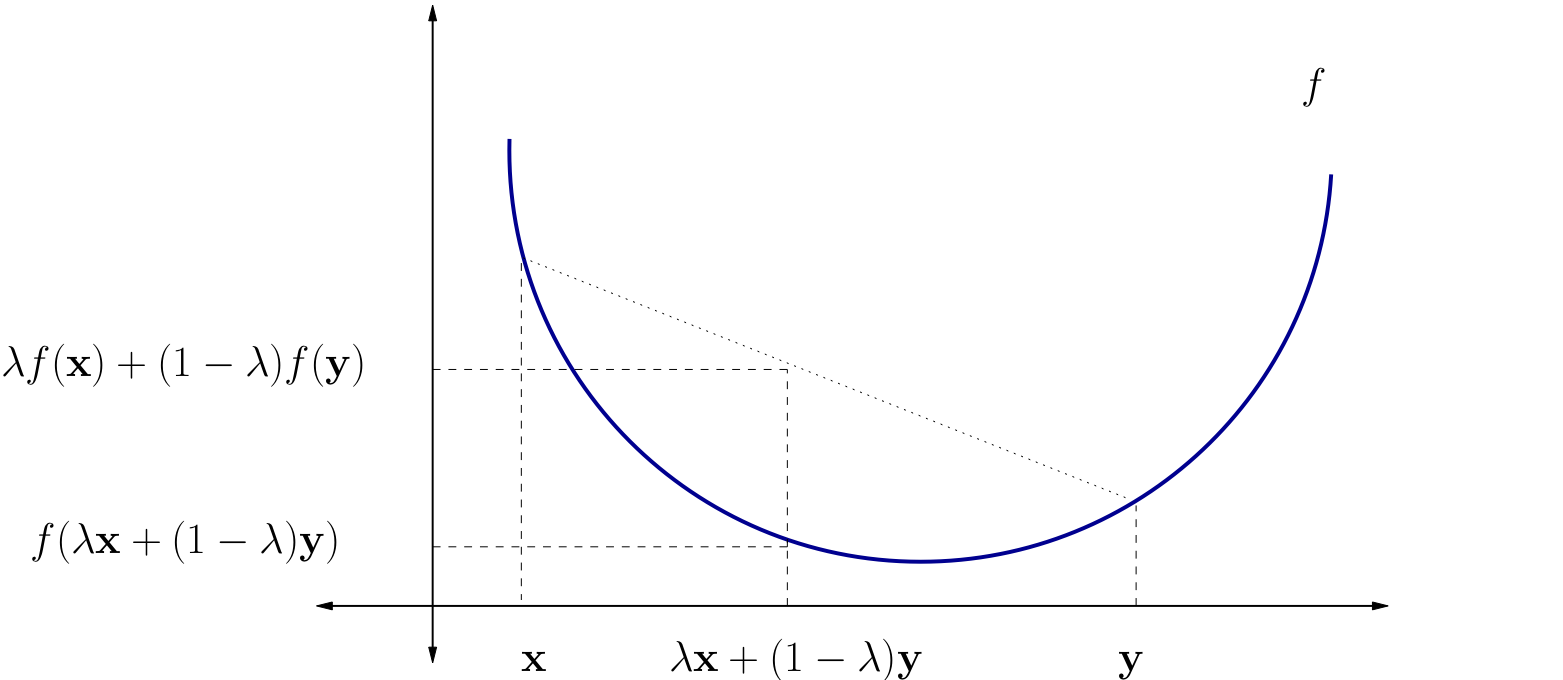
Fig. 58 A strictly convex function on a subset of \(\mathbb{R}\)#
Fact
\(f \colon A \to \mathbb{R}\) is convex if and only if its epigraph (aka supergraph)
is a convex subset of \(\mathbb{R}^K \times \mathbb{R}\)
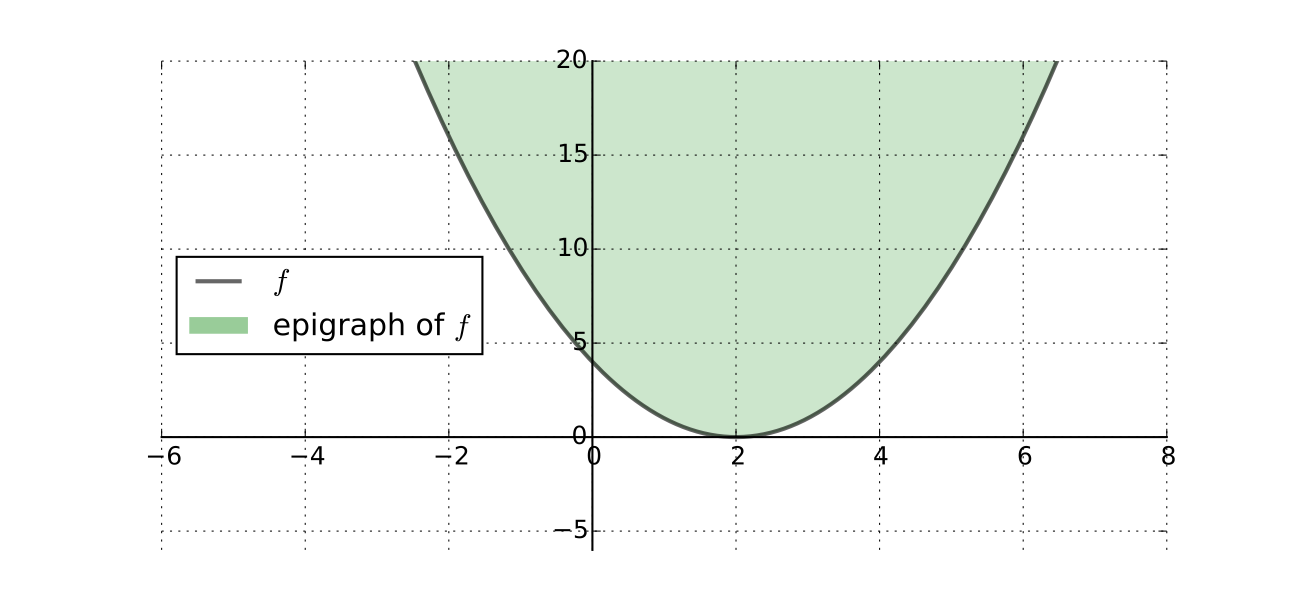
Fig. 59 Convex epigraph/supergraph of a function#
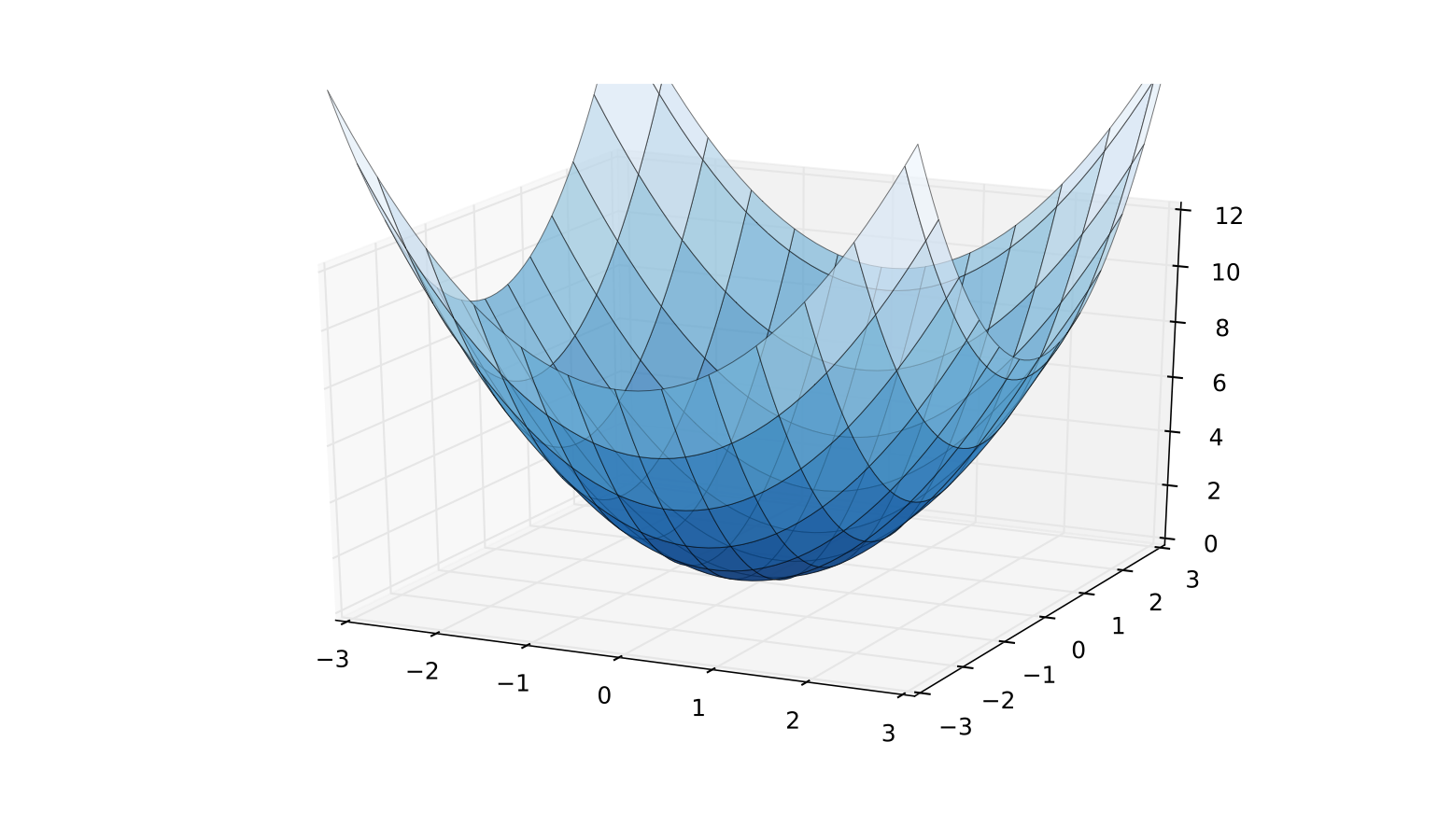
Fig. 60 A strictly convex function on a subset of \(\mathbb{R}^2\)#
Example
\(f(x) = \|x\|\) is convex on \(\mathbb{R}^K\)
Proof
To see this recall that, by the properties of norms,
That is,
Fact
If \(A\) is \(K \times K\) and positive definite, then
is strictly convex on \(\mathbb{R}^K\)
Proof
Proof: Fix \(x, y \in \mathbb{R}^K\) with \(x \ne y\) and \(\lambda \in (0, 1)\)
Exercise: Show that
Since \(x - y \ne 0\) and \(0 < \lambda < 1\), the right hand side is \(> 0\)
Hence
Concave Functions#
Let \(A \subset \mathbb{R}^K\) be a convex and let \(f\) be a function from \(A\) to \(\mathbb{R}\)
Definition
\(f\) is called concave if
for all \(x, y \in A\) and all \(\lambda \in [0, 1]\)
\(f\) is called strictly concave if
for all \(x, y \in A\) with \(x \ne y\) and all \(\lambda \in (0, 1)\)
Exercise: Show that
\(f\) is concave if and only if \(-f\) is convex
\(f\) is strictly concave if and only if \(-f\) is strictly convex
Fact
\(f \colon A \to \mathbb{R}\) is concave if and only if its hypograph (aka subgraph)
is a convex subset of \(\mathbb{R}^K \times \mathbb{R}\)
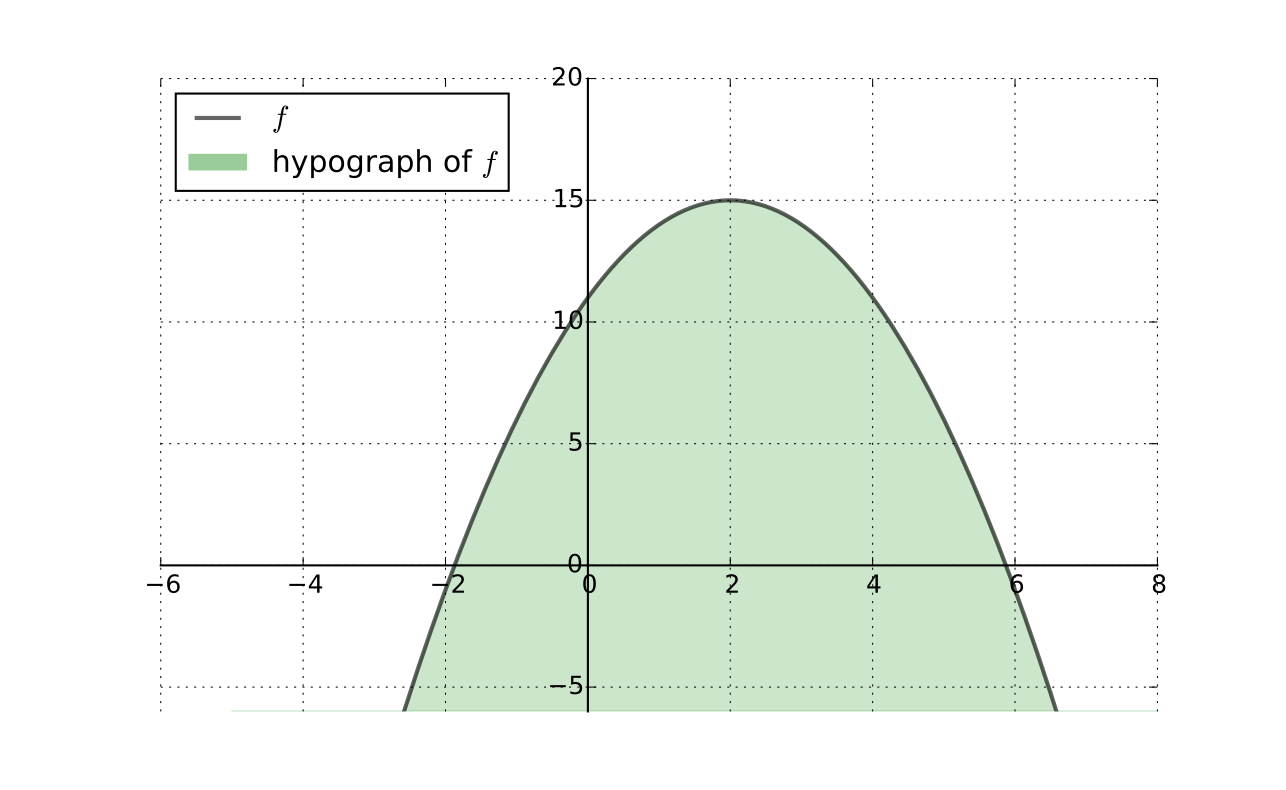
Fig. 61 Convex hypograph/subgraph of a function#
Preservation of Shape#
Let \(A \subset \mathbb{R}^K\) be convex and let \(f\) and \(g\) be functions from \(A\) to \(\mathbb{R}\)
Fact
If \(f\) and \(g\) are convex (resp., concave) and \(\alpha \geq 0\), then
\(\alpha f\) is convex (resp., concave)
\(f + g\) is convex (resp., concave)
If \(f\) and \(g\) are strictly convex (resp., strictly concave) and \(\alpha > 0\), then
\(\alpha f\) is strictly convex (resp., strictly concave)
\(f + g\) is strictly convex (resp., strictly concave)
Proof
Let’s prove that \(f\) and \(g\) convex \(\implies h := f + g\) convex
Pick any \(x, y \in A\) and \(\lambda \in [0, 1]\)
We have
Hence \(h\) is convex \(\blacksquare\)
Hessian based shape criterion#
Fact
If \(f \colon A \to \mathbb{R}\) is a \(C^2\) function where \(A \subset \mathbb{R}^K\) is open and convex, then
\(Hf(x)\) positive semi-definite (nonnegative definite) for all \(x \in A\) \(\iff f\) convex
\(Hf(x)\) negative semi-definite (nonpositive definite) for all \(x \in A\) \(\iff f\) concave
In addition,
\(Hf(x)\) positive definite for all \(x \in A\) \(\implies f\) strictly convex
\(Hf(x)\) negative definite for all \(x \in A\) \(\implies f\) strictly concave
Proof: Omitted
Example
Let \(A := (0, \infty) \times (0, \infty)\) and let \(U \colon A \to \mathbb{R}\) be the utility function
Assume that \(\alpha\) and \(\beta\) are both strictly positive
Exercise: Show that the Hessian at \(c := (c_1, c_2) \in A\) has the form
Exercise: Show that any diagonal matrix with strictly negative elements along the principle diagonal is negative definite
Conclude that \(U\) is strictly concave on \(A\)
Sufficiency of first order conditions#
There two advantages of convexity/concavity:
Sufficiency of first order conditions for optimality
Uniqueness of optimizers with strict convexity/concavity
Fact (sufficient FOC)
Let \(A \subset \mathbb{R}^K\) be convex set and let \(f \colon A \to \mathbb{R}\) be concave/convex differentiable function. Then \(x^* \in A\) is a minimizer/minimizer of \(f\) on \(A\) if and only if \(x^*\) is a stationary point of \(f\) on \(A\).
Note that weak convexity/concavity is enough for this result: first order condition becomes sufficient
However, the optimizer may not be unique (see below results on uniqueness)
Proof
See [Sundaram, 1996], Theorem 7.15
Uniqueness of Optimizers#
Fact
Let \(A \subset \mathbb{R}^K\) be convex set and let \(f \colon A \to \mathbb{R}\)
If \(f\) is strictly convex, then \(f\) has at most one minimizer on \(A\)
If \(f\) is strictly concave, then \(f\) has at most one maximizer on \(A\)
with this fact we don’t know in general if \(f\) has a maximizer
but if it does, then it has exactly one
Proof
Proof for the case where \(f\) is strictly concave:
Suppose to the contrary that
\(a\) and \(b\) are distinct points in \(A\)
both are maximizers of \(f\) on \(A\)
By the def of maximizers, \(f(a) \geq f(b)\) and \(f(b) \geq f(a)\)
Hence we have \(f(a) = f(b)\)
By strict concavity, then
This contradicts the assumption that \(a\) is a maximizer
Fact (sufficient conditions for uniqueness)
Let \(A \subset \mathbb{R}^K\) be open convex set, let \(f \colon A \to \mathbb{R}\) be a \(C^2\) function, and \(x^* \in A\) stationary. Then if \(f\) strictly convex/concave, \(x^*\) is the unique minimizer/maximizer of \(f\) on \(A\).
\(f\) strictly convex \(\implies\) \(x^*\) is the unique minimizer of \(f\) on \(A\)
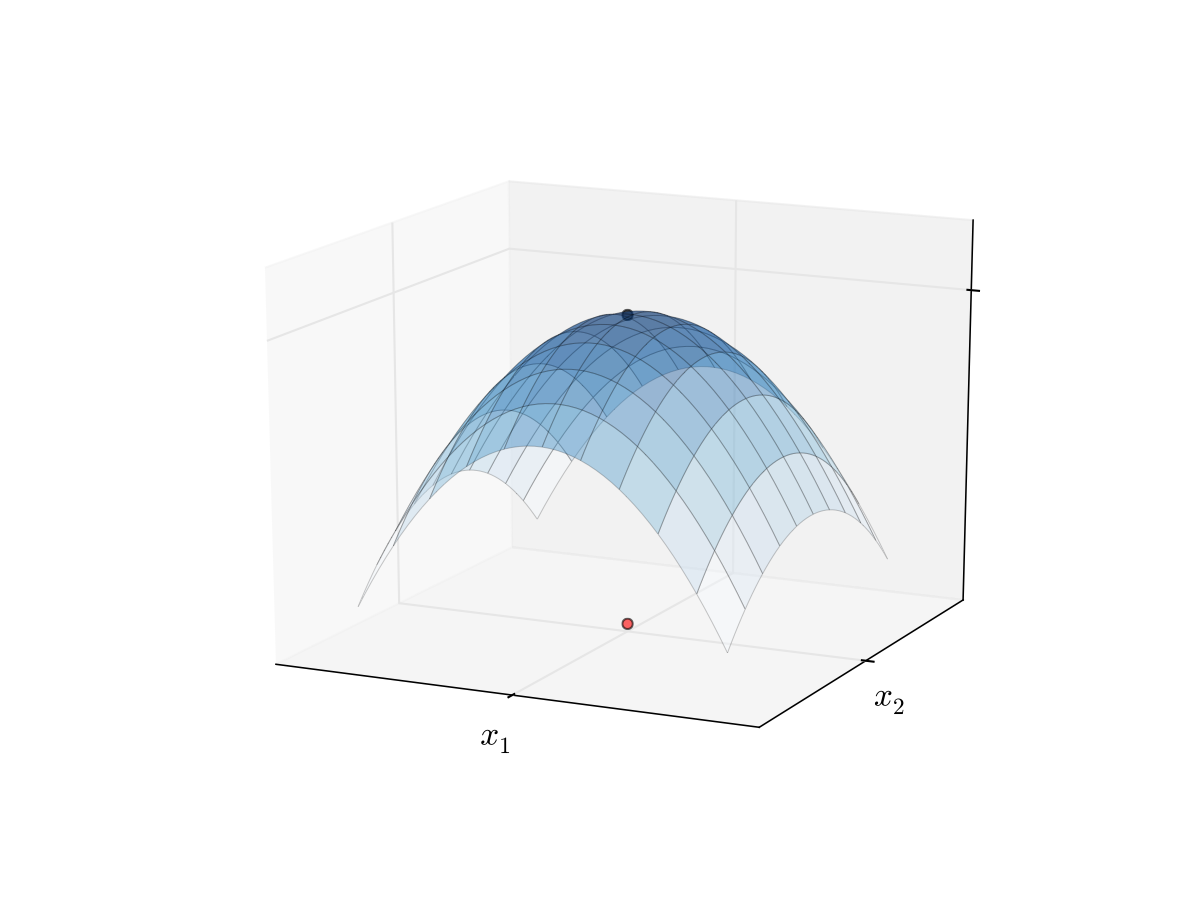
Fig. 62 Unique maximizer for a strictly concave function#
Roadmap for unconstrained optimization#
Assuming that the domain of the objective function is the whole space, check that the function is continuous and twice continuously differentiable to apply derivative based methods
Derive the gradient and Hessian of the objective function. Check if definiteness of Hessian can be established globally to show if shape conditions are satisfied.
Find all stationary points by solving FOC
If the function is (strictly) convex/concave, FOCs are sufficient for optimality. In the strict case, the stationary points are unique. Problem solved.
Otherwise, check SOC to determine whether found stationary points are local maxima or minima and filter out saddle points.
If asked to assess whether the identified local optima are global check the boundaries of the domain of the function, with the goal of comparing the function values there with those at the local optima. Also consider the limits of the function at infinity and check if there are any vertical asymptotes.
Example
Let’s start by computing the gradient and Hessian of the function:
Is \(Hf(x,y)\) positive definite everywhere? The answer is given by the principal minors of the Hessian:
It is obvious that \(D_2\) changes sign at the curve \(y=1/9x\), therefore the function is not convex or concave on \(\mathbb{R}^2\). We have to check both first and second order conditions.
By substituting \(y=-x^3\) into the second equation we have
So, we have three stationary points, and examining the definiteness of the Hessian at them:
\((0,0)\), \(D_2(0,0) <0\) \(\implies\) saddle point since the leading principal minors do not satisfy the definiteness pattern
\((1,-1)\), \(D_2(1,-1) >0\) \(\implies\) \(Hf(1,-1)\) positive definite \(\implies\) local minimum
\((-1,1)\), \(D_2(-1,1) >0\) \(\implies\) \(Hf(-1,1)\) positive definite \(\implies\) local minimum
Example
Let’s start by computing the gradient and Hessian of the function:
Clearly, the first and second leading principal minors are positive for all \(x,y \in \mathbb{R}\), therefore the function is strictly convex on \(\mathbb{R}^2\). We have to check first order conditions only which are in this case sufficient, and the minimizer is unique, both local and global.