Screencast of the lecture (part 1 and part 2)


📖 Unconstrained optimization#
⏱ | words
References and additional materials
Chapters 17.1, 17.2, 17.3
Chapter 2.1, 2.2, 2.4, whole of chapter 4
A general optimization problem#
Example
Consider a (monopolistic) firm that is facing a market demand for its products \(D(p) = \alpha + \frac{1}{4\alpha}p^2-p\) and the cost of production \(C(q) = \beta q + \delta q^2\). As usual, \(p\) and \(q\) denote price and quantity of product, respectively.
To maximize its profit \(\pi(p,q) = pq-C(q)\), the firm solves the following optimization problem
Plugging in the functions \(D(p)\) and \(C(q)\) we have an equivalent formulation
Components of the optimization problem#
Objective function: function to be maximized or minimized, also known as maximand
In the example above profit function \(\pi(p,q) = pq - C(q)\) to be maximizedDecision/choice variables: the variables that the agent can control in order to optimize the objective function, also known as controls
In the example above price \(p\) and quantity \(q\) variables that the firm can choose to maximize its profitEquality constraints: restrictions on the choice variables in the form of equalities
In the example above \(q = \alpha + \frac{1}{4\alpha}p^2-p\)Inequality constraints (weak and strict): restrictions on the choice variables in the form of inequalities
In the example above \(q \ge 0\) and \(p > 0\)Parameters: the variables that are not controlled by the agent, but affect the objective function and/or constraints
In the example above \(\alpha\), \(\beta\) and \(\delta\) are parameters of the problemValue function: the “optimized” value of the objective function as a function of parameters
In the example above \(\Pi(\alpha,\beta,\delta)\) is the value function
Definition
The general form of the optimization problem is
where:
\(f(x,\theta) \colon \mathbb{R}^n \times \mathbb{R}^K \to \mathbb{R}\) is an objective function
\(x \in \mathbb{R}^n\) are decision/choice variables
\(\theta \in \mathbb{R}^K\) are parameters
\(g_i(x,\theta) = 0, \; i\in\{1,\dots,I\}\) where \(g_i \colon \mathbb{R}^n \times \mathbb{R}^K \to \mathbb{R}\), are equality constraints
\(h_j(x,\theta) \le 0, \; j\in\{1,\dots,J\}\) where \(h_j \colon \mathbb{R}^n \times \mathbb{R}^K \to \mathbb{R}\), are inequality constraints
\(V(\theta) \colon \mathbb{R}^K \to \mathbb{R}\) is a value function
Definition
The set of admissible choices (admissible set) contains all the choices that satisfy the constraints of the optimization problem.
Note
Sometimes the equality constraints are dropped from the definition of the optimization problem, because they can always be represented as a pair of inequality constraints \(g_i(x,\theta) \le 0\) and \(-g_j(x,\theta) \le 0\)
Note
Note that strict inequality constraints are not present in the definition above, although they may be present in the economic applications. You already know that this has to do with the intention to keep the set of admissible choices closed, such that the solution of the problem (has a better chance to) exist. Sometimes they are added to the definition.
A roadmap for formulating an optimization problem (in economics)
Determine which variables are choice variables and which are parameters according to what the economic agent has control over
Determine whether the optimization problem is a maximization or a minimization problem
Determine the objective function of the economic agent (and thus the optimization problem)
Determine the constraints of the optimization problem: equality and inequality, paying particular attention to whether inequalities should be strict or weak (the latter has huge implications for the existence of the solution)
Example
Consider a decision maker who is deciding how to divide the money they have between food and services, bank deposit and buying some crypto. Discuss and Write down the corresponding optimization problem. [class exercise]
Classes of the optimization problems#
Static optimization: finite number of choice variables
singe instance of choice
deterministic finite horizon dynamic choice models can be represented as static
our main focus in this course
Dynamic programming: some choice variables are infinite sequences, solved using similar techniques as static optimization
will touch upon in the end of the course
Deterministic optimal control: some “choice variables” are functions, completely new theory is needed
Stochastic optimal control: “choice variables” are functions, objective function is a stochastic process, yet more theory is needed
Reminder from one-dimensional optimization#
Definition
Consider a function \(f: A \to \mathbb{R}\) where \(A \subset \mathbb{R}^n\). A point \(x^* \in A\) is called a
maximizer of \(f\) on \(A\) if \(f(x^*) \geq f(x)\) for all \(x \in A\)
minimizer of \(f\) on \(A\) if \(f(x^*) \leq f(x)\) for all \(x \in A\)
Definition
Point \(x \in \mathbb{R}\) is called interior to \([a, b]\) if \(a < x < b\)
A stationary point of \(f\) on \([a, b]\) is an interior point \(x\) with \(f'(x) = 0\)
Fact (first order condition)
If \(f\) is differentiable and \(x^*\) is either an interior minimizer or an interior maximizer of \(f\) on \([a, b]\), then \(x^*\) is stationary
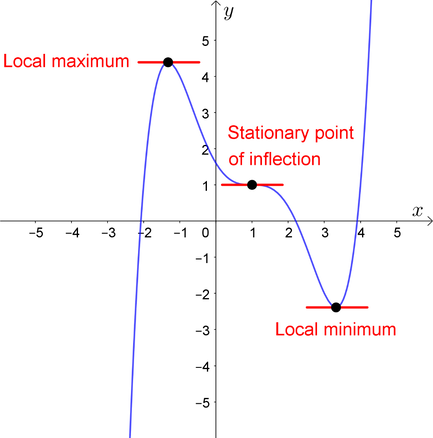
Fig. 55 Both \(x^*\) and \(x^{**}\) are stationary#
Sufficient conditions for convexity/concavity in one dimension
Let \(f \colon [a, b] \to \mathbb{R}\)
If \(f''(x) \geq 0\) for all \(x \in (a, b)\) then \(f\) is convex on \((a, b)\)
If \(f''(x) > 0\) for all \(x \in (a, b)\) then \(f\) is strictly convex on \((a, b)\)
If \(f''(x) \leq 0\) for all \(x \in (a, b)\) then \(f\) is concave on \((a, b)\)
If \(f''(x) < 0\) for all \(x \in (a, b)\) then \(f\) is strictly concave on \((a, b)\)
Fact (shape conditions and uniqueness)
Let \(f \colon [a, b] \to \mathbb{R}\)
If \(f\) is concave and \(x^* \in (a, b)\) is stationary then \(x^*\) is a maximizer
If, in addition, \(f\) is strictly concave, then \(x^*\) is the unique maximizer
If \(f\) is convex and \(x^* \in (a, b)\) is stationary then \(x^*\) is a minimizer
If, in addition, \(f\) is strictly convex, then \(x^*\) is the unique minimizer
We could also speak of second order conditions in the context of one-dimensional optimization, but we will cover them in the multivariate case below
Basic concepts in \(\mathbb{R}^n\)#
In this lecture we focus on the unconstrained optimization problems of the form
which can also be written as
where \(f(x,\theta) \colon \mathbb{R}^n \to \mathbb{R}\) and unless stated otherwise is assumed to be continuous and twice continuously differentiable everywhere on \(\mathbb{R}^n\).
Recall that twice continuously differentiable functions are referred to as \(C^2\)
Parameter \(\theta\) may or may not be present.
In \(\mathbb{R}\) we didn’t mention the destinction between constrained and non-constrained optimization
all examples were of constrained optimization problem with the constraint given by the domain of the function \([a,b]\)
in general constraints can be given in the definition of domain which is equivalent
In this lecture we focus on general functions \(f \colon \mathbb{R}^n \to \mathbb{R}\) without restrictions on their domain
Every point in the whole space \(\mathbb{R}^n\) is interior, therefore we should expect that all maximizers/minimizers have to be stationary points
Assuming differentiability implies we can focus on derivative based conditions
Definition
Given a function \(f \colon \mathbb{R}^n \to \mathbb{R}\), a point \(x \in \mathbb{R}^n\) is called a stationary point of \(f\) if \(\nabla f(x) = {\bf 0}\)
Note gradient and zero vector \({\bf 0} = (0,\dots,0)\)
Only local maximizers/minimizers#
Recall that the approach for finding the global maximizers/minimizers of univariate functions was to compare the function values at all stationary points and the endpoints of the domain
this was sufficient to directly compare all points that could be maximizers/minimizers
crucially, the set of such points was finite
In \(\mathbb{R}^n\) we can not have the same algorithm because the set of boundary points is in general infinite
lines/surfaces instead of endpoints
Therefore, from now on focus only on local minimizers/maximizers
we will not be able to find the global maximizers/minimizers in general
Definition
Consider a function \(f: A \to \mathbb{R}\) where \(A \subset \mathbb{R}^n\). A point \(x^* \in A\) is called a
local maximizer of \(f\) if \(\exists \delta>0\) such that \(f(x^*) \geq f(x)\) for all \(x \in B_\delta(x^*) \cap A\)
local minimizer of \(f\) if \(\exists \delta>0\) such taht \(f(x^*) \leq f(x)\) for all \(x \in B_\delta(x^*) \cap A\)
If the inequality is strict, then \(x^\star\) is called a strict local maximizer/minimizer of \(f\)
A global maximizer/minimizer must also be a local one, but the opposite is not true in general
First oder conditions (FOC)#
The first order conditions are the necessary conditions for a local maximizer/minimizer
Fact (Necessary condition for optima)
Let \(f(x,\theta) \colon \mathbb{R}^n \to \mathbb{R}\) be a differentiable function and let \(x^\star \in \mathbb{R}^n\) be a local maximizer/minimizer of \(f\). Then \(x^\star\) is a stationary point of \(f\), that is \(\nabla f(x^\star) = 0\)
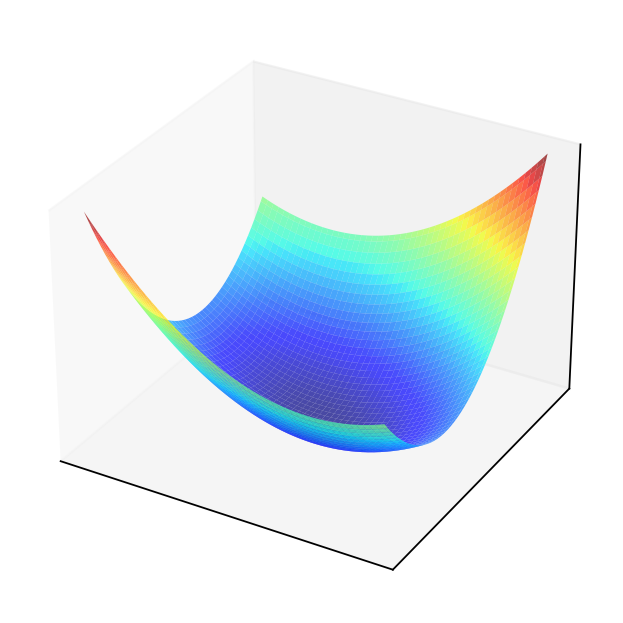
Example
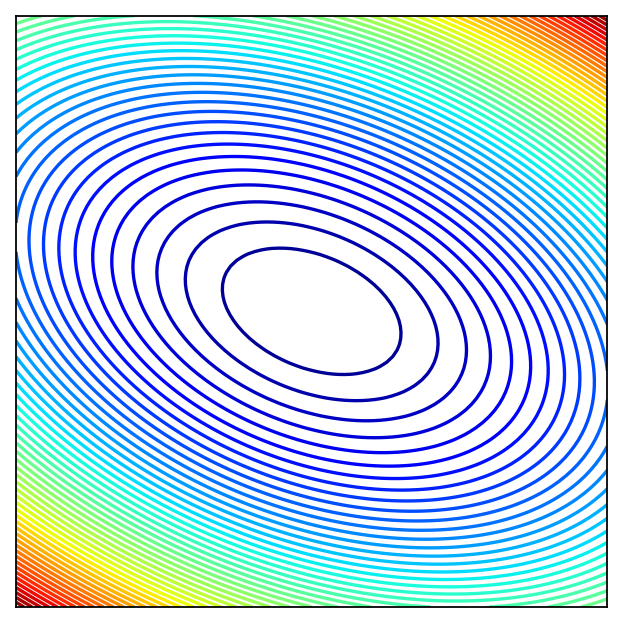
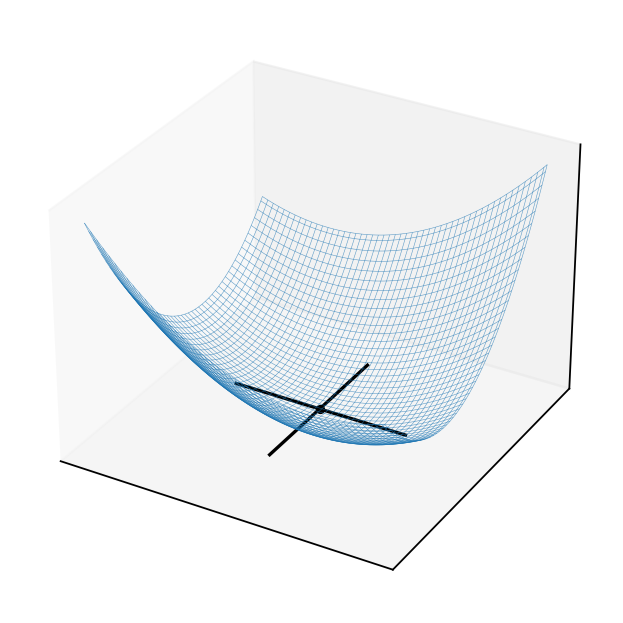
Consider quadratic form \(f(x) = x^T A x\) where \(A = \left( \begin{array}{rr} 1,& 0.5 \\ 0.5,& 2 \end{array} \right)\)
Solving the FOC
The point \((0,0)\) should be an optimizer.
Show code cell source
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
A = np.array([[1,.5],[.5,2]])
f = lambda x: x@A@x
x = y = np.linspace(-5.0, 5.0, 100)
X, Y = np.meshgrid(x, y)
zs = np.array([f((x,y)) for x,y in zip(np.ravel(X), np.ravel(Y))])
Z = zs.reshape(X.shape)
fig = plt.figure(dpi=160)
ax1 = fig.add_subplot(111, projection='3d')
ax1.plot_surface(X, Y, Z,
rstride=2,
cstride=2,
cmap=cm.jet,
alpha=0.7,
linewidth=0.25)
plt.setp(ax1,xticks=[],yticks=[],zticks=[])
fig = plt.figure(dpi=160)
ax2 = fig.add_subplot(111)
ax2.set_aspect('equal', 'box')
ax2.contour(X, Y, Z, 50,
cmap=cm.jet)
plt.setp(ax2, xticks=[],yticks=[])
fig = plt.figure(dpi=160)
ax3 = fig.add_subplot(111, projection='3d')
ax3.plot_wireframe(X, Y, Z,
rstride=2,
cstride=2,
alpha=0.7,
linewidth=0.25)
f0 = f(np.zeros((2)))+0.1
ax3.scatter(0, 0, f0, c='black', marker='o', s=10)
ax3.plot([-3,3],[0,0],[f0,f0],color='black')
ax3.plot([0,0],[-3,3],[f0,f0],color='black')
plt.setp(ax3,xticks=[],yticks=[],zticks=[])
plt.show()
Example
Consider quadratic form \(f(x) = x^T A x\) where \(A = \left( \begin{array}{rr} 1,& 0.5 \\ 0.5,& -2 \end{array} \right)\)
Solving the FOC
The point \((0,0)\) should be an optimizer?
Show code cell source
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
A = np.array([[1,.5],[.5,-2]])
f = lambda x: x@A@x
x = y = np.linspace(-5.0, 5.0, 100)
X, Y = np.meshgrid(x, y)
zs = np.array([f((x,y)) for x,y in zip(np.ravel(X), np.ravel(Y))])
Z = zs.reshape(X.shape)
fig = plt.figure(dpi=160)
ax1 = fig.add_subplot(111, projection='3d')
ax1.plot_surface(X, Y, Z,
rstride=2,
cstride=2,
cmap=cm.jet,
alpha=0.7,
linewidth=0.25)
plt.setp(ax1,xticks=[],yticks=[],zticks=[])
fig = plt.figure(dpi=160)
ax2 = fig.add_subplot(111)
ax2.set_aspect('equal', 'box')
ax2.contour(X, Y, Z, 50,
cmap=cm.jet)
plt.setp(ax2, xticks=[],yticks=[])
fig = plt.figure(dpi=160)
ax3 = fig.add_subplot(111, projection='3d')
ax3.plot_wireframe(X, Y, Z,
rstride=2,
cstride=2,
alpha=0.7,
linewidth=0.25)
f0 = f(np.zeros((2)))+0.1
ax3.scatter(0, 0, f0, c='black', marker='o', s=10)
ax3.plot([-3,3],[0,0],[f0,f0],color='black')
ax3.plot([0,0],[-3,3],[f0,f0],color='black')
plt.setp(ax3,xticks=[],yticks=[],zticks=[])
plt.show()
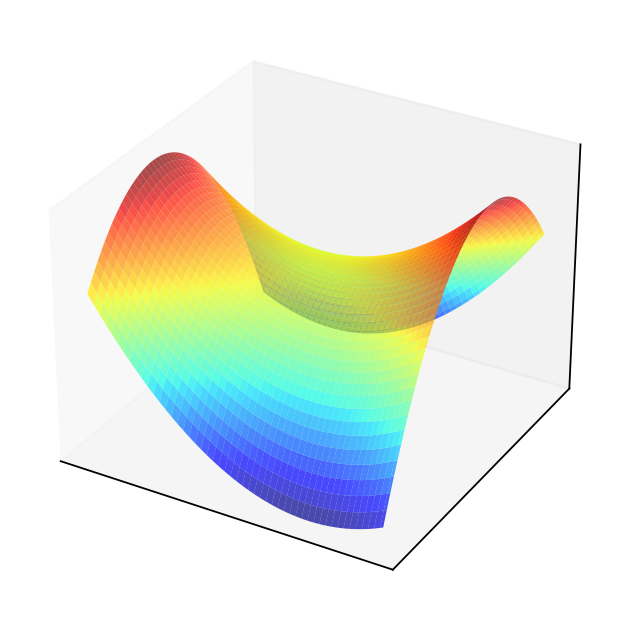
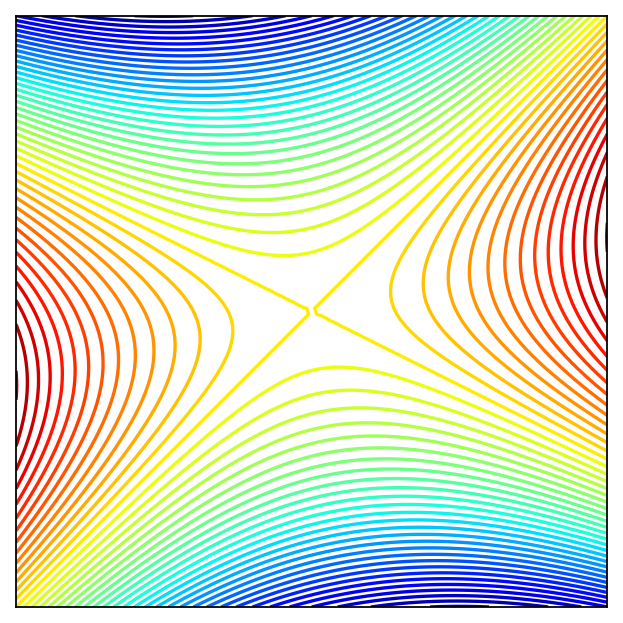
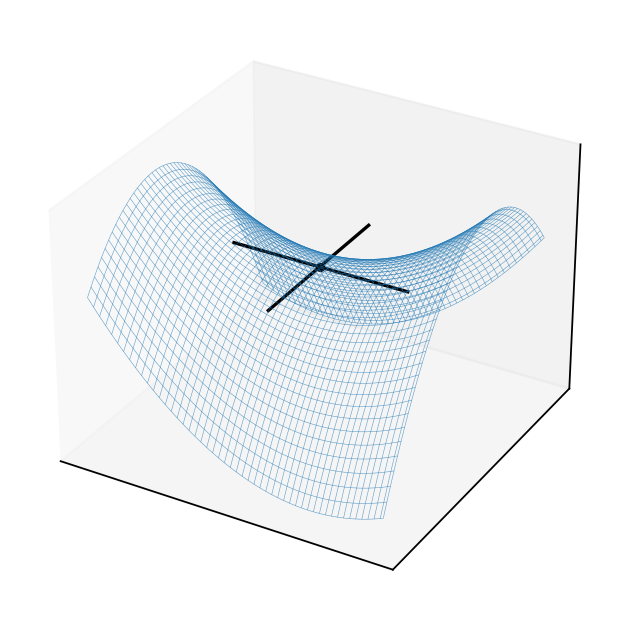
This is an example of a saddle point where the FOC hold, yet the point is not a local maximizer/minimizer!
Similar to \(x=0\) in \(f(x) = x^3\): derivative is zero, yet the point is not an optimizer
How to distinguish saddle points from optima? Key insight: the second order derivative changes sign in this point
In multivariate case the sign of the second derivative is equivalent to definiteness of the Hessian matrix!
Second order conditions (SOC)#
Allows us to establish whether the stationary point is a local maximizer/minimizer or a saddle point
Help determining whether an optimizer is a maximizer or a minimizer
But does not give definitive answer in all cases, unfortunately!
Fact (necessary SOC)
Let \(f(x) \colon \mathbb{R}^n \to \mathbb{R}\) be a twice continuously differentiable function and let \(x^\star \in \mathbb{R}^n\) be a local maximizer/minimizer of \(f\). Then:
\(f\) has a local maximum at \(x^\star \implies Hf(x^\star)\) is negative semi-definite
\(f\) has a local minimum at \(x^\star \implies Hf(x^\star)\) is positive semi-definite
Recall the definition of semi-definiteness
Note that the logical implication goes one way!
Fact (sufficient SOC)
Let \(f(x) \colon \mathbb{R}^n \to \mathbb{R}\) be a twice continuously differentiable function. Then:
if \(x\) satisfies the first order condition and \(Hf(x^\star)\) is negative definite, then \(x^\star\) is a strict local maximum of \(f\)
if \(x\) satisfies the first order condition and \(Hf(x^\star)\) is positive definite, then \(x^\star\) is a strict local minimum of \(f\)
observe that SOC are only necessary in the “weak” form, but are sufficient in the “strong” form
this leaves room for ambiguity when we can not arrive at a conclusion — particular stationary point may be a local maximum or minimum
but we can rule out saddle points for sure, in this case neither semi-definiteness nor definiteness can be established, the Hessian is indefinite
Example
Consider a one dimensional function \(f(x) = (x-1)^2\), \(\nabla f(x)=2x-2\), \(Hf(x) = 2\).
Point \(x=1\) is a stationary point where FOC is satisfied.
Treating \(Hf(x)\) as \(1 \times 1\) matrix, we can see it is positive definite at \(x=1\) (\(y'[2]y = 2y^2 > 0\) for all \(y \ne 0\)), therefore \(x=1\) is a strict local minimum of \(f\).
Example
Consider a one dimensional function \(f(x) = x^2-1\), \(\nabla f(x)=2x\), \(Hf(x) = 2\).
Point \(x=0\) is a stationary point where FOC is satisfied.
Treating \(Hf(x)\) as \(1 \times 1\) matrix, we can see it is positive definite at \(x=0\) (\(y'[2]y = 2y^2 > 0\) for all \(y \ne 0\)), therefore \(x=0\) is a strict local minimum of \(f\).
Example
Consider a one dimensional function \(f(x) = (x-1)^4\), \(\nabla f(x)=4(x-1)^3\), \(Hf(x) = 12(x-1)^2\).
Point \(x=1\) is a stationary point where FOC is satisfied.
Treating \(Hf(x)\) as \(1 \times 1\) matrix, we can see it is positive semi-definite (and negative semi-definite) at \(x=1\) (\(y'[0]y = 0 \ge 0\) and \(y'[0]y = 0 \le 0\) for all \(y \in \mathbb{R}\)), therefore at \(x=1\) function \(f\) may have a local minimum. But may have a local maximum as well. No definite conclusion! (In reality it is a local and global minimum)
Example
Consider a one dimensional function \(f(x) = (x+1)^3\), \(\nabla f(x)=3(x+1)^2\), \(Hf(x) = 6(x+1)\).
Point \(x=-1\) is a stationary point where FOC is satisfied.
Treating \(Hf(x)\) as \(1 \times 1\) matrix, we can see it is positive semi-definite (and negative semi-definite) at \(x=-1\) (\(y'[0]y = 0 \ge 0\) and \(y'[0]y = 0 \le 0\) for all \(y \in \mathbb{R}\)), therefore at \(x=1\) function \(f\) may have a local minimum. But may have a local maximum as well. No definite conclusion! (In reality it is neither local minimum nor maximum)
Simplified definiteness of Hessian in \(\mathbb{R}^2\) special case#
Recall the eigenvalue criterion of definiteness for a symmetric matrix \(A\):
positive definite \(\iff\) all eigenvalues are strictly positive
negative definite \(\iff\) all eigenvalues are strictly negative
nonpositive definite \(\iff\) all eigenvalues are nonpositive
nonnegative definite \(\iff\) all eigenvalues are nonnegative
indefinite \(\iff\) there are both positive and negative eigenvalues
Let \(H\) be a \(2 \times 2\) matrix \(\to\) eigenvalues are roots of a quadratic equation
Hence the the two eigenvalues \(\lambda_1\) and \(\lambda_2\) of \(H\) are given by the two roots of
From the Viets’s formulas for a quadratic polynomial we have
Applying this result to a Hessian of a function \(f: \mathbb{R}^2 \to \mathbb{R}\) we have
Fact
Given a twice continuously differentiable function \(f: \mathbb{R}^2 \to \mathbb{R}\) and a stationary point \(x^\star: \; \nabla f(x^\star) = 0\), the second order conditions provide:
if \(\mathrm{det}(Hf(x^\star)) > 0\) and \(\mathrm{trace}(Hf(x^\star)) > 0\) \(\implies\)
\(\lambda_1 > 0\) and \(\lambda_2 > 0\),
\(Hf(x^\star)\) is positive definite,
\(f\) has a strict local minimum at \(x^\star\)
if \(\mathrm{det}(Hf(x^\star)) > 0\) and \(\mathrm{trace}(Hf(x^\star)) < 0\) \(\implies\)
\(\lambda_1 < 0\) and \(\lambda_2 < 0\),
\(Hf(x^\star)\) is negative definite,
\(f\) has a strict local maximum at \(x^\star\)
if \(\mathrm{det}(Hf(x^\star)) = 0\) and \(\mathrm{trace}(Hf(x^\star)) > 0\) \(\implies\)
\(\lambda_1 = 0\) and \(\lambda_2 > 0\),
\(Hf(x^\star)\) is positive semi-definite (nonnegative definite),
\(f\) may have a local minimum \(x^\star\)
undeceive!
if \(\mathrm{det}(Hf(x^\star)) = 0\) and \(\mathrm{trace}(Hf(x^\star)) < 0\) \(\implies\)
\(\lambda_1 = 0\) and \(\lambda_2 < 0\),
\(Hf(x^\star)\) is negative semi-definite (nonpositive definite),
\(f\) may have a local maximum \(x^\star\)
undeceive!
if \(\mathrm{det}(Hf(x^\star)) < 0\)
\(\lambda_1\) and \(\lambda_2\) have different signs,
\(Hf(x^\star)\) is indefinite,
\(x^\star\) is a saddle point of \(f\)
Example
Consider a two dimensional function \(f(x) = (x_1-1)^2 + x_1 x_2^2\)
Point \(x_1^\star=(1,0)\) is a stationary point where FOC is satisfied.
Therefore at \(x_1^\star=(1,0)\) function \(f\) has a strict local minimum.
Point \(x_2^\star=(1+\tfrac{\sqrt{2}}{2},-\sqrt{2})\) is also a stationary point where FOC is satisfied.
Therefore at \(x_2^\star=(1,0)\) function \(f\) has a saddle point.
Point \(x_3^\star=(1-\tfrac{\sqrt{2}}{2},\sqrt{2})\) is yet another stationary point where FOC is satisfied.
Therefore again, at \(x_3^\star=(1,0)\) function \(f\) has a saddle point.